Simulation
In order to test out the robot, we exported the 3D model into gazebo, along with a custom built testing ground.
All source files are in /models/gazebo.
TennisBot v1
In order to keep our simulation simple and smooth, we exported a simplified version of the TennisBot using solidworks’ URDF exporter. This simplified verion has a simple geometry while maintaining the exact dimensions of the robot.
^Here it is running in RViz
This model has a total of 5 joints,
- 1 joint for tilt control
- 1 joint per wheel
- 1 joint per trigger
Each joint can be independently controlled (as shown above).
All the source files can be found in /models/gazebo/tennisbot_support.
Launch in RViz
roslaunch tennisbot_support display.launch
Launch in Gazebo
roslaunch tennisbot_support gazebo.launch
Tennis Court
In order to test out our robot design, we first created a tennis court in Blender, then exported it to URDF for use in gazebo.
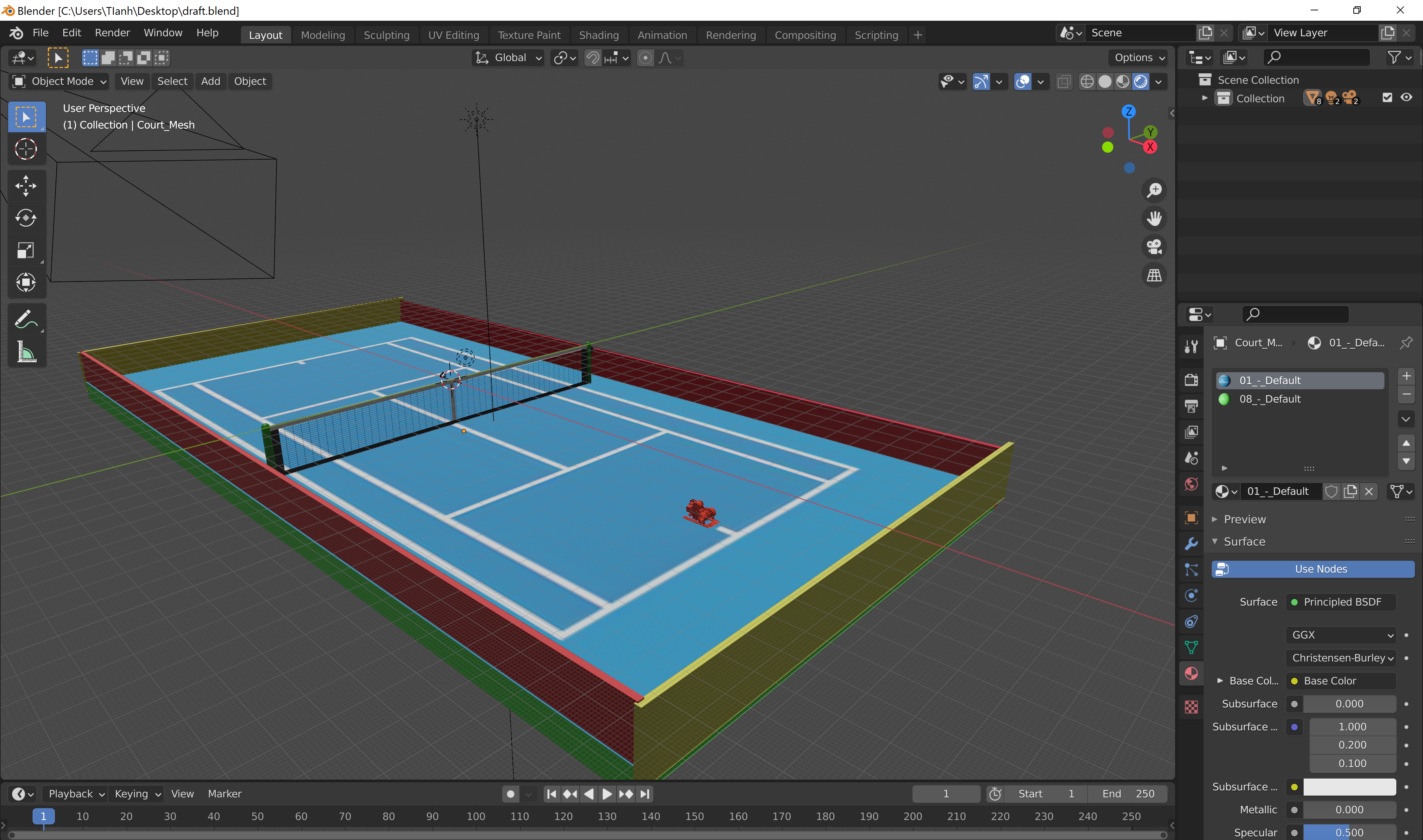
^The red object is our robot
Gazebo world
/models/gazebo/tennis court/Tennis_Court.world