V2 and Beyond
The eventual goal for this project is to have a fully automated robot for playing a full tennis match.
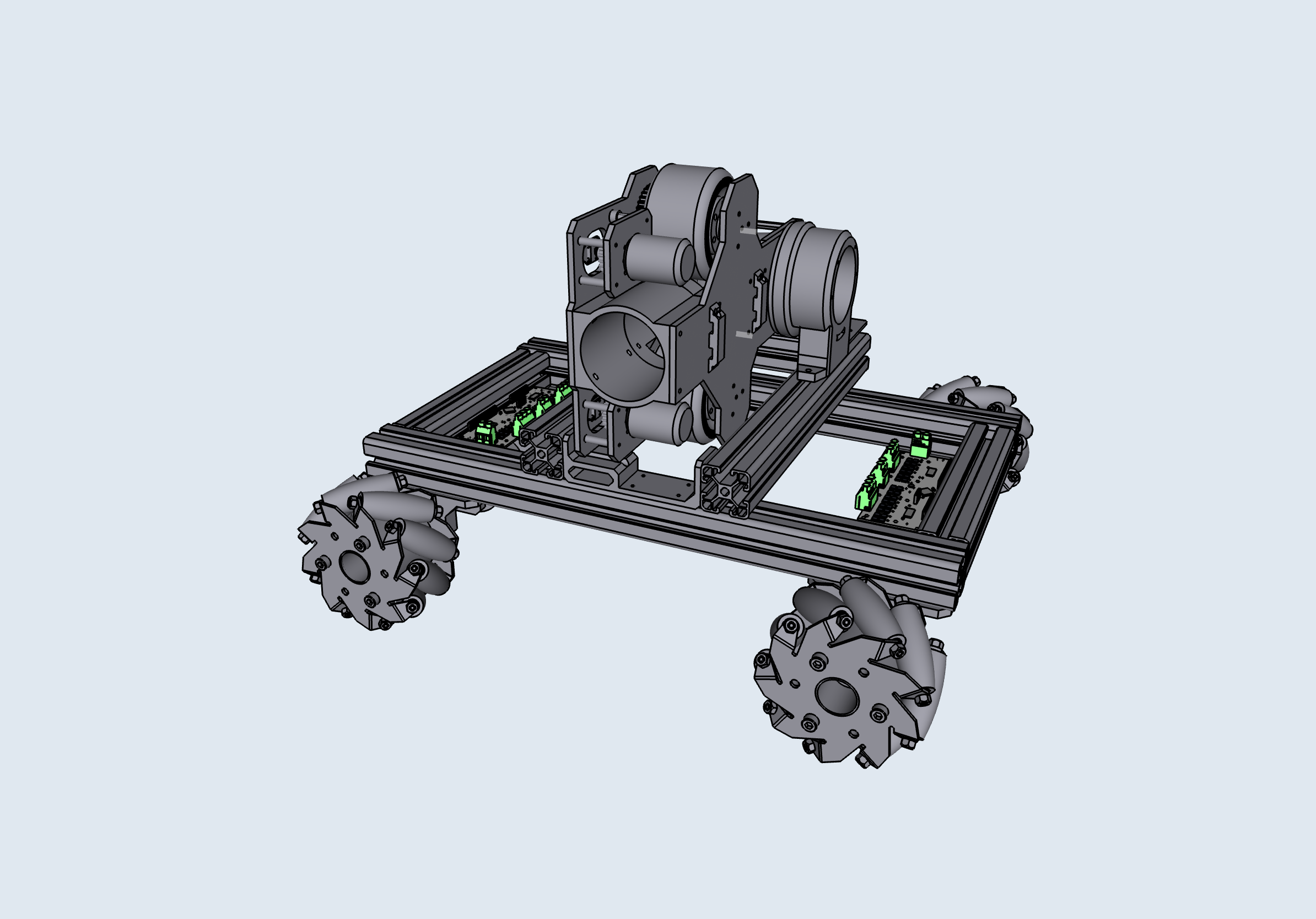
V2 Changes
- A chassis will be added, driven by 4 omni-directional wheels each with an individual motor.
-
QuickShot library will support target in
xdirection as well.# Shoot the ball 1 meter to the left and 2 meters up front. q.calc_params( y=200, x=-100, # ... ) - A stereo depth camera on-board for trajectory prediction, in order for the robot to “return” the ball.
- The v2 robot does not actually return the ball in the traditional sense, instead, it moves to where the ball is suppose to land and shoots a ball back immediately.