Connecting to Turtlebot3 or Plaform Robots from VNC
Before you get started, make sure you have the latest version of rosutils on your VNC
To update rosutils, use the command cd ~/rosutils && git pull
You will then need to run the command source ~/.bashrc after updating rosutils
Turning on the robot (Turtlebot3)
-
Make note of the name of your robot written on the top.

-
Connect the battery to the robot.

-
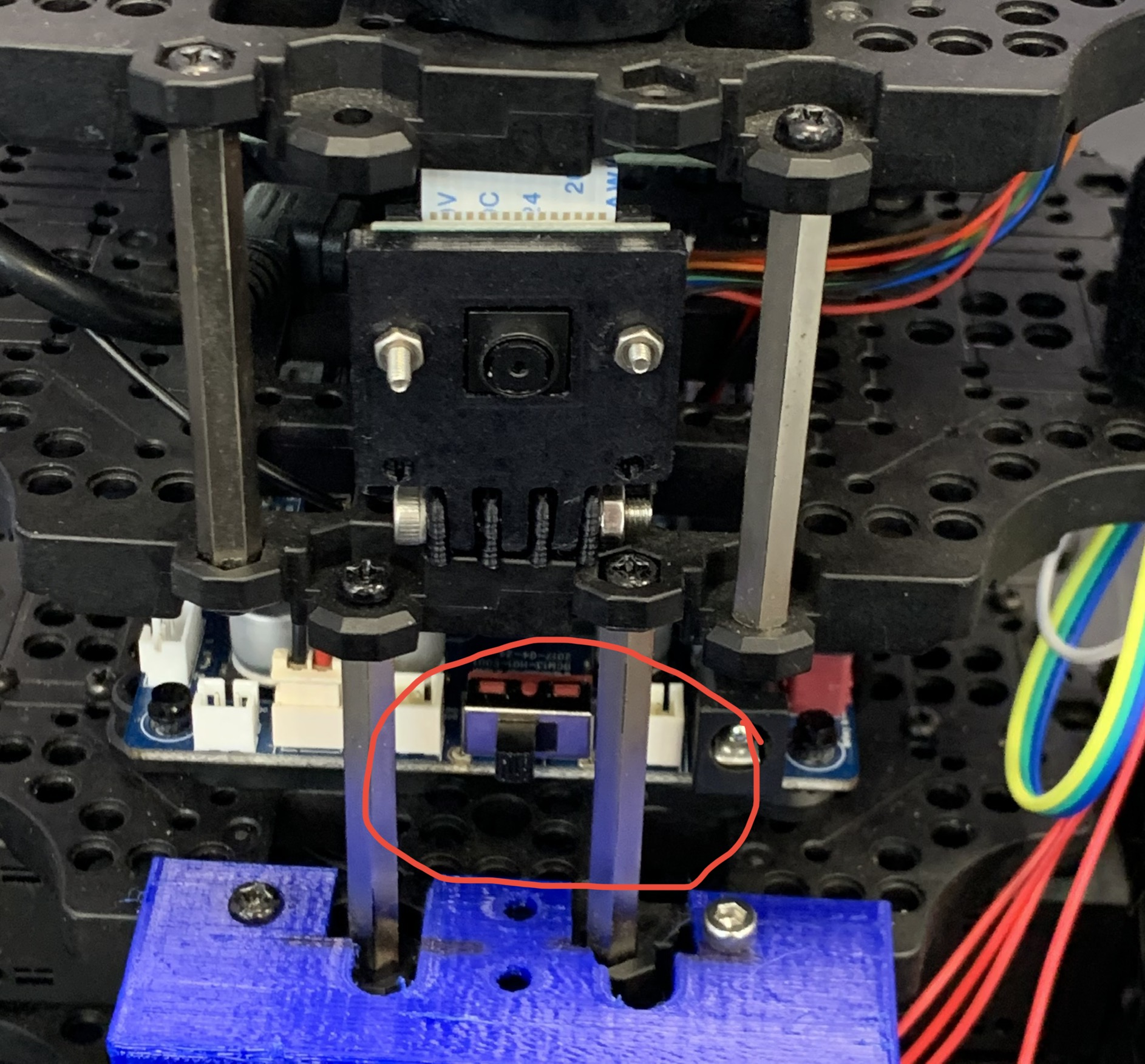
Turn on the robot using the switch just under the camera.
-
You should see the lights on the raspberry pi in the robot turn green. The robot may take up to a minute to finish its boot sequence.
Steps to connect
- Make note of the name of your robot. It should be written on the top of the robot. For the purposes of this tutorial, I will be connecting to roba, but you should replace roba with the name of your robot.
- Run
tailscale status | grep robain a terminal. You should get an output that looks something like this:100.86.78.102 roba pitosalas@ linux -. Make note of the IP starting with 100, this is the IP address of your robot. - Edit the file
~/.bashrcin your vscode editor on the VNC. Add the following two lines to the bottom of the file, but in the second line you will need to replace where it saysrobaand the IP address with the name of your robot and your robot's IP address respectively. - Run the command
sbin the terminal. You should see your command prompt change to something that looks like this:[real:roba] - If the robot is already on, run the command
sshrobotin your terminal in your VNC. You might be asked to add a new ssh fingerprint, if so simply typeyesin the prompt and continue. You will be asked the password of the robot, which is going to beROSlab134for all of the lab robots. - Once you see that your terminal prompt looks like
[onboard:roba]you are connected to the robot. The final step is to typebringupin the robot's terminal. This will run the bringup script so it is crucial that you do not close the terminal where this is running.